Description
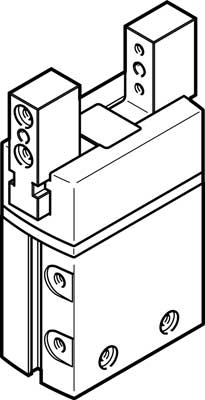
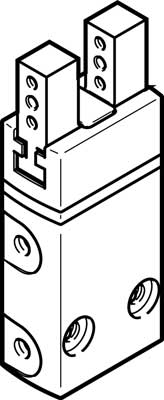
adaptive shape gripper kit for robots DHEF-20-A-RA1

adaptive shape gripper kit for robots DHEF-20-A-RA1
| Weight | 2985 g |
|---|---|
| Dimensions | 450.0000 × 150.0000 × 400.0000 mm |
| Размер | 20 |
| Inverting cap version | Стандарт |
| Положение при сборке | Любое |
| Режим работы | двустороннего действия |
| Функция захвата | Adaptive |
| Тип конструкции | Inverting cap, последовательность перемещения по направляющей |
| Направляющая | Базовая направляющая |
| Определение позиции | Для герконов |
| Рабочая среда | Сжатый воздух в соответствии с ISO8573-1:2010 [7:4:4] |
| Примечание по рабочей среде | Операция смазывания невозможна |
| Классификация сопротивления коррозии CRC | 2 – Средняя стойкость к коррозии |
| Тип крепления | To ISO 9409 |
| Пневматическое присоединение | M5 |
| Замечания по материалу | Содержит PWIS вещества, Соответствует директиве по ограничению использования опасных веществ (RoHS) |
| Материал крышки | VMQ (силикон) |
| Материал корпуса | Анодированный алюминий |
| Robot connection | Universal robots UR3/5/10 (PolyScope CB 3.8.0 or higher), Universal robots UR3e/5e/10e (PolyScope SW 5.0.0 or higher) |
| Accessories included | 1x proportional-pressure regulator, 1x solenoid valve, 1x USB-Stick mit URCap, 1x Velcro® roll, 2x proximity switch, 3x connecting cable |
| Рабочее давление, привод шарового крана | max:8 bar, min:1 bar |
| Operating pressure of cap | max:0,1 bar, min:0,07 bar |
| Температура окружающей среды | max:60 °C, min:0 °C |
| Ход | min:66 mm |
| Мин. Захватываемый диаметр | min:12 mm |
| Макс. захватываемый диаметр | min:38 mm |
| Burst pressure of cap | min:0,3 bar |
| Макс. частота работы захвата | min:1 Hz |
| Время обратного хода | min:290 ms |
| Время выдвижения | min:270 ms |
| Массовый момент инерции | min:1,29 kgcm2 |
| Bc[jlyjt pyfxtybt 'aatrnbdyjq yfuheprb | min:1 kg |
| Минимальное количество поставки |




 Официальный партнер компании FESTO
Официальный партнер компании FESTO Магазин-склад с 4600 позиций в наличии
Магазин-склад с 4600 позиций в наличии Всевозможные способы оплаты
Всевозможные способы оплаты Доставка по всей России
Доставка по всей России Более 24 000 наименований на сайте
Более 24 000 наименований на сайте Выгодные цены, скидки постоянным клиентам
Выгодные цены, скидки постоянным клиентамНе можете найти то, что вам нужно?
Заполните форму обратной связи и мы свяжемся с вами в течение 15 минут